حل مسائل در مکانیک فنی. حل مسائل در مکانیک فنی نحوه صحیح صدور یک تکلیف برای مکانیک فنی
وظایف حل و فصل - تحلیلی و حل و فصل - گرافیک در تمام بخش های دوره مکانیک فنی داده شده است. هر کار شامل شرحی از راه حل مشکلات با دستورالعمل های مختصر است، نمونه هایی از راه حل ها آورده شده است. پیوست ها حاوی مطالب مرجع لازم هستند. برای دانش آموزان تخصص های ساختمانی مدارس متوسطه حرفه ای.
تعیین واکنش های پیوندهای ایده آل به روش تحلیلی.
1. نقطه ای را که تعادل آن در نظر گرفته شده است را مشخص کنید. در کارهای مستقل، چنین نقطه ای مرکز ثقل بدن یا نقطه تلاقی همه میله ها و نخ ها است.
2. نیروهای فعال را به نقطه در نظر گرفته اعمال کنید. در وظایف کار مستقل، نیروهای فعال وزن خود بدن یا وزن بار هستند که به سمت پایین هدایت می شوند (به طور صحیح تر، به سمت مرکز ثقل زمین). در صورت وجود بلوک، وزن بار بر روی نقطه در نظر گرفته شده در امتداد نخ عمل می کند. جهت این نیرو از روی نقشه مشخص می شود. وزن بدن معمولا با حرف G نشان داده می شود.
3. از نظر ذهنی اتصالات را کنار بگذارید و عمل آنها را با واکنش اتصالات جایگزین کنید. در مسائل پیشنهادی، از سه نوع پیوند استفاده میشود - یک صفحه ایدهآل صاف، میلههای مستقیم صلب ایدهآل و رزوههای انعطافپذیر ایدهآل - که از این پس به ترتیب صفحه، میله و نخ نامیده میشوند.
فهرست مطالب
پیشگفتار
بخش I. کار مستقل و کنترلی
فصل 1. مکانیک نظری. استاتیک
1.1. تعیین تحلیلی واکنش های پیوند ایده آل
1.2. تعیین واکنش های تکیه گاه یک تیر بر روی دو تکیه گاه تحت اثر بارهای عمودی
1.3. تعیین موقعیت مرکز ثقل مقطع
فصل 2. مقاومت مصالح
2.1. انتخاب مقاطع میله بر اساس استحکام
2.2. تعیین ممان مرکزی اصلی اینرسی مقطع
2.3. ترسیم نیروهای برشی و ممان خمشی برای یک تیر ساده
2.4. تعیین مقدار مجاز نیروی فشار مرکزی
فصل 3
3.1. ساخت نمودار نیروهای داخلی برای ساده ترین قاب تک مدار
3.2. تعیین گرافیکی نیروها در میله های خرپایی با ساختن نمودار ماکسول-کرمونا
3.3. تعیین حرکات خطی در ساده ترین قاب های کنسولی
3.4. محاسبه یک پرتو استاتیکی نامعین (پیوسته) با توجه به معادله سه لحظه
بخش دوم. شهرک سازی و کارهای گرافیکی
فصل 4. مکانیک نظری. استاتیک
4.1. تعیین نیروها در میله های ساده ترین خرپا کنسول
4.2. تعیین واکنش های تکیه گاه یک تیر بر روی دو تکیه گاه
4.3. تعیین موقعیت مرکز ثقل مقطع
فصل 5
5.1. تعیین نیروها در میله های یک سیستم استاتیکی نامعین
5.2. تعیین ممان های اصلی اینرسی مقطع
5.3. انتخاب مقطع تیر از تیر نورد I
5.4. انتخاب بخش از رک کامپوزیت فشرده مرکزی
فصل 6
6.1. تعیین نیرو در مقاطع قوس سه لولایی
6.2. تعریف گرافیکی نیروها در میله ها خرپا تختبا ساختن نمودار ماکسول - کرمونا
6.3. محاسبه یک قاب استاتیکی نامعین
6.4. محاسبه یک پرتو پیوسته با توجه به معادله سه لحظه
برنامه های کاربردی
کتابشناسی - فهرست کتب.
دانلود رایگان کتاب الکترونیکیدر قالبی مناسب، تماشا کنید و بخوانید:
دانلود کتاب مجموعه مسائل در مکانیک فنی Setkov VI 2003 – fileskachat.com دانلود سریع و رایگان.
پی دی اف دانلود کنید
در ادامه می توانید این کتاب را خریداری کنید بهترین قیمتبا تخفیف با تحویل در سراسر روسیه.
سینماتیک
سینماتیک یک نقطه مادی
تعیین سرعت و شتاب یک نقطه با توجه به معادلات داده شده حرکت آن
داده شده: معادلات حرکت یک نقطه: x = 12 گناه (πt/6)، سانتی متر؛ y= 6 cos 2 (πt/6)، سانتی متر.
نوع مسیر آن را برای لحظه زمان t = تنظیم کنید 1 ثانیهموقعیت یک نقطه روی مسیر، سرعت آن، شتاب های کامل، مماسی و نرمال و همچنین شعاع انحنای مسیر را پیدا کنید.
حرکت انتقالی و چرخشی یک جسم صلب

داده شده:
t = 2 ثانیه; r 1 = 2 سانتی متر، R 1 = 4 سانتی متر؛ r 2 = 6 cm، R 2 = 8 cm. r 3 \u003d 12 سانتی متر، R 3 \u003d 16 سانتی متر؛ s 5 \u003d t 3 - 6t (سانتی متر).
در زمان t = 2 سرعت نقاط A, C را تعیین کنید. شتاب زاویه ای چرخ 3; شتاب نقطه B و شتاب رک 4.
تحلیل سینماتیکی مکانیزم تخت

داده شده:
R 1، R 2، L، AB، ω 1.
پیدا کنید: ω 2 .

مکانیزم تخت از میله های 1، 2، 3، 4 و نوار لغزنده E تشکیل شده است. میله ها با استفاده از لولاهای استوانه ای به هم متصل می شوند. نقطه D در وسط نوار AB قرار دارد.
داده شده: ω 1 , ε 1 .
پیدا کنید: سرعت های V A , V B , V D و V E . سرعت های زاویه ای ω 2 , ω 3 و ω 4 . شتاب a B ; شتاب زاویه ای ε AB پیوند AB. موقعیت مراکز آنی سرعت P 2 و P 3 پیوندهای 2 و 3 مکانیسم.
تعیین سرعت مطلق و شتاب مطلق یک نقطه

یک صفحه مستطیل شکل حول یک محور ثابت طبق قانون φ = می چرخد 6 t 2 - 3 t 3. جهت مثبت خواندن زاویه φ در شکل ها با فلش کمانی نشان داده شده است. محور چرخش OO 1 در صفحه صفحه قرار دارد (صفحه در فضا می چرخد).
نقطه M در امتداد خط مستقیم BD در امتداد صفحه حرکت می کند. قانون حرکت نسبی آن داده شده است، یعنی وابستگی s = AM = 40 (t - 2 t 3) - 40(s - در سانتی متر، t - در ثانیه). فاصله b = 20 سانتی متر. در شکل نقطه M در موقعیتی که s = AM نشان داده شده است > 0 (برای اس< 0 نقطه M در طرف دیگر نقطه A است).
سرعت مطلق و شتاب مطلق نقطه M را در زمان t بیابید 1 = 1 ثانیه.
پویایی شناسی
ادغام معادلات دیفرانسیل حرکت یک نقطه مادی تحت تأثیر نیروهای متغیر
بار D به جرم m، با دریافت سرعت اولیه V 0 در نقطه A، در یک لوله منحنی ABC واقع در صفحه عمودی. در مقطع AB که طول آن l است، بار تحت تأثیر یک نیروی ثابت T (جهت آن در شکل نشان داده شده است) و نیروی R مقاومت محیط (ماژول این نیرو R = μV است). 2، بردار R مخالف سرعت V بار است.
بار با تکمیل حرکت خود در بخش AB، در نقطه B لوله، بدون تغییر مقدار مدول سرعت خود، به بخش BC منتقل می شود. در مقطع BC، یک نیروی متغیر F بر روی بار وارد می شود که برآمدگی F x آن بر روی محور x داده شده است.
با در نظر گرفتن بار به عنوان یک نقطه مادی، قانون حرکت آن را در مقطع قبل از میلاد پیدا کنید، یعنی. x = f(t)، که در آن x = BD. اصطکاک بار روی لوله را نادیده بگیرید.

دانلود راه حل
قضیه تغییر انرژی جنبشی یک سیستم مکانیکی
سیستم مکانیکی شامل وزنه های 1 و 2، غلتک استوانه ای 3، قرقره های دو مرحله ای 4 و 5 است. بخش هایی از نخ ها موازی با صفحات مربوطه هستند. غلتک (سیلندر همگن جامد) بدون لغزش در امتداد صفحه مرجع غلت می خورد. شعاع پله های قرقره های 4 و 5 به ترتیب R 4 = 0.3 m، r 4 = 0.1 m، R 5 = 0.2 m، r 5 = 0.1 m است. جرم هر قرقره به طور یکنواخت در امتداد لبه بیرونی آن توزیع شده است. صفحات نگهدارنده وزنه های 1 و 2 ناهموار هستند، ضریب اصطکاک لغزشی برای هر وزن f = 0.1 است.
تحت تأثیر نیروی F که مدول آن مطابق قانون F = F(s) تغییر می کند، جایی که s جابجایی نقطه اعمال آن است، سیستم از حالت سکون شروع به حرکت می کند. هنگامی که سیستم حرکت می کند، نیروهای مقاومت بر روی قرقره 5 وارد می شوند که ممان آن نسبت به محور چرخش ثابت و برابر با M 5 است.
مقدار سرعت زاویه ای قرقره 4 را در لحظه ای که جابجایی s نقطه اعمال نیروی F برابر با s 1 = 1.2 متر می شود، تعیین کنید. 
دانلود راه حل
کاربرد معادله کلی دینامیک در مطالعه حرکت یک سیستم مکانیکی
برای یک سیستم مکانیکی، شتاب خطی را a 1 تعیین کنید. در نظر بگیرید که برای بلوک ها و غلتک ها، جرم ها در امتداد شعاع بیرونی توزیع می شوند. کابل ها و تسمه ها بی وزن و غیر قابل امتداد در نظر گرفته می شوند. هیچ لغزشی وجود ندارد اصطکاک غلتشی و لغزشی را نادیده بگیرید. 
دانلود راه حل
کاربرد اصل دالامبر در تعیین واکنش تکیه گاه های یک جسم دوار
شفت عمودی AK که به طور یکنواخت با سرعت زاویه ای ω = 10 s -1 می چرخد، با یک یاتاقان رانش در نقطه A و یک یاتاقان استوانه ای در نقطه D ثابت می شود.
یک میله بی وزن 1 با طول l 1 = 0.3 متر به طور صلب به شفت وصل شده است که در انتهای آزاد آن باری به جرم m 1 = 4 کیلوگرم و یک میله همگن 2 به طول l 2 = وجود دارد. 0.6 متر، با جرم m 2 = 8 کیلوگرم. هر دو میله در یک صفحه عمودی قرار دارند. نقاط اتصال میله ها به شفت و همچنین زوایای α و β در جدول نشان داده شده است. ابعاد AB=BD=DE=EK=b که b=0.4 متر است. بار را به عنوان نقطه مادی در نظر بگیرید.
با غفلت از جرم شفت، واکنش های یاتاقان رانش و یاتاقان را تعیین کنید.

بسیاری از دانشجویان دانشگاه هنگام شروع به تدریس رشته های فنی پایه مانند مقاومت مصالح و مکانیک نظری در دوره تحصیلی خود با مشکلات خاصی مواجه می شوند. این مقاله به یکی از این موضوعات - به اصطلاح مکانیک فنی - توجه خواهد کرد.
مکانیک فنی علمی است که مکانیسم های مختلف، سنتز و تجزیه و تحلیل آنها را مطالعه می کند. در عمل، این به معنای ترکیبی از سه رشته است - مقاومت مواد، مکانیک نظری و قطعات ماشین. راحت است که هر مؤسسه آموزشی به چه نسبتی برای تدریس این دوره ها انتخاب می کند.
بر این اساس، در اکثر کنترل کار می کندوظایف به سه بلوک تقسیم می شوند که باید به طور جداگانه یا با هم حل شوند. بیایید رایج ترین وظایف را در نظر بگیریم.
بخش یک. مکانیک نظری
از بین مسائل مختلف در مکانیک نظری، اغلب می توان به مسائلی از بخش سینماتیک و استاتیک برخورد کرد. اینها وظایفی در مورد تعادل یک قاب صاف، تعریف قوانین حرکت اجسام و تجزیه و تحلیل سینماتیک مکانیسم اهرم هستند.
برای حل مسائل مربوط به تعادل یک قاب تخت، لازم است از معادله تعادل برای سیستم مسطح نیروها استفاده شود:
![]()
مجموع پیش بینی تمام نیروها بر روی محورهای مختصات برابر با صفر و مجموع گشتاورهای همه نیروها در مورد هر نقطه برابر با صفر است. با حل این معادلات با هم، بزرگی واکنش های تمام تکیه گاه های قاب تخت را تعیین می کنیم.
در وظایف تعیین پارامترهای سینماتیکی اصلی حرکت اجسام، بر اساس یک مسیر یا قانون حرکت معین ضروری است. نقطه مادی، سرعت، شتاب (کامل، مماسی و نرمال) و شعاع انحنای مسیر را تعیین کنید. قوانین حرکت نقطه ای با معادلات مسیر به دست می آیند:
پیش بینی سرعت نقطه روی محورهای مختصات با افتراق معادلات مربوطه به دست می آید:
![]()
با تفکیک معادلات سرعت، پیش بینی های شتاب نقطه را پیدا می کنیم. شتاب های مماسی و نرمال، شعاع انحنای مسیر به صورت گرافیکی یا تحلیلی یافت می شوند:
![]()
![]()
تجزیه و تحلیل سینماتیک مکانیسم اهرم طبق طرح زیر انجام می شود:
- تقسیم مکانیسم به گروه های Assur
- ساخت و ساز برای هر یک از گروه های طرح برای سرعت و شتاب
- تعیین سرعت و شتاب کلیه پیوندها و نقاط مکانیزم.
بخش دو. مقاومت مصالح
استحکام مواد بخشی است که درک آن بسیار دشوار است، با وظایف مختلف بسیاری که اکثر آنها بر اساس روش خود حل می شوند. به منظور آسان کردن حل مسائل برای دانش آموزان، اغلب در دوره مکانیک کاربردی، مسائل ابتدایی برای مقاومت ساده سازه ها به آنها داده می شود - علاوه بر این، نوع و ماده سازه، به عنوان یک قاعده، به این بستگی دارد. مشخصات دانشگاه
رایج ترین مشکلات کشش-فشردگی، خمش و پیچش است.
در مسائل تنش- فشاری، لازم است نمودارهای نیروهای طولی و تنش های معمولی و گاهی جابجایی مقاطع سازه ساخته شود.
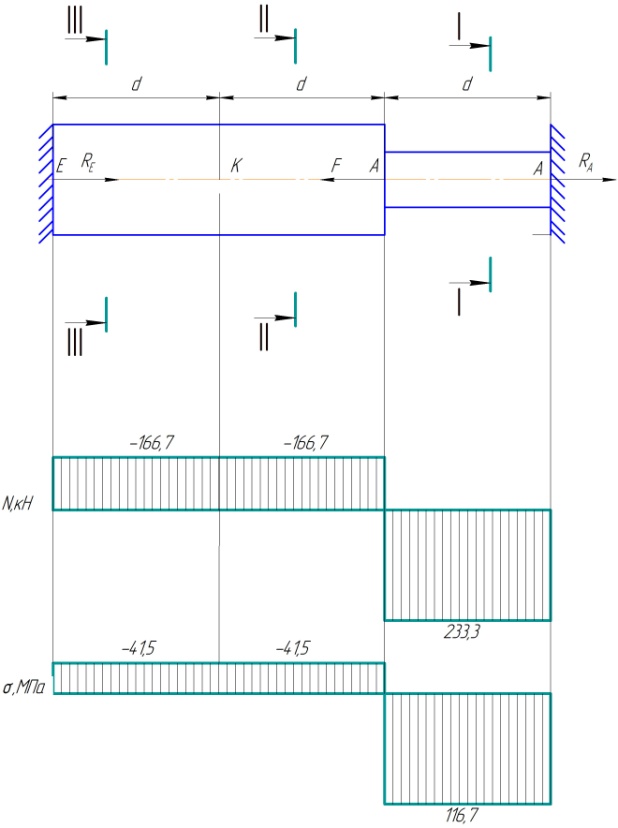
برای انجام این کار، لازم است سازه را به بخش هایی تقسیم کنیم که مرزهای آن مکان هایی است که بار اعمال می شود یا منطقه تغییر می کند. سطح مقطع. علاوه بر این، با استفاده از فرمول های تعادل یک جسم جامد، مقادیر نیروهای داخلی را در مرزهای مقاطع تعیین می کنیم و با در نظر گرفتن سطح مقطع، تنش های داخلی را تعیین می کنیم.
با توجه به داده های به دست آمده، ما نمودارها - نمودارها را می سازیم و محور تقارن سازه را به عنوان محور نمودار می گیریم.
مشکلات پیچشی مشابه مشکلات خمشی است با این تفاوت که به جای نیروهای کششی، گشتاور به بدنه وارد می شود. با در نظر گرفتن این موضوع، لازم است مراحل محاسبه تکرار شود - تقسیم بندی به بخش ها، تعیین لحظه های پیچش و زوایای پیچش و رسم.
در مسائل خمشی باید محاسبه و تعیین شود نیروهای عرضیو لحظات خمشی برای تیر بارگذاری شده.
ابتدا واکنش های تکیه گاه هایی که تیر در آنها ثابت است مشخص می شود. برای انجام این کار، باید معادلات تعادل سازه را با در نظر گرفتن تمام نیروهای عامل یادداشت کنید.
پس از آن، تیر به بخش هایی تقسیم می شود که مرزهای آن نقاط اعمال نیروهای خارجی خواهد بود. با در نظر گرفتن تعادل هر مقطع به طور جداگانه، نیروهای عرضی و لنگرهای خمشی در مرزهای مقاطع تعیین می شوند. بر اساس داده های به دست آمده، کرت ها ساخته می شوند.
آزمایش مقاومت مقطعی به شرح زیر انجام می شود:
- محل بخش خطرناک تعیین می شود - بخشی که بیشترین لحظات خمشی در آن عمل می کند.
- از شرط مقاومت در خمش، ممان مقاومت مقطع تیر مشخص می شود.
- اندازه بخش مشخصه تعیین می شود - قطر، طول ضلع یا شماره پروفیل.
بخش سه. قطعات ماشین
بخش "جزئیات ماشین" همه وظایف را برای محاسبه مکانیسم هایی که در شرایط واقعی کار می کنند ترکیب می کند - این می تواند یک درایو نوار نقاله یا یک قطار دنده باشد. این کار را بسیار تسهیل می کند که تمام فرمول ها و روش های محاسبه در کتاب های مرجع آورده شده است و دانش آموز فقط باید مواردی را انتخاب کند که برای مکانیزم معین مناسب هستند.
ادبیات
- مکانیک نظری: رهنمودهاو کنترل وظایفبرای دانشجویان پاره وقت مهندسی، ساخت و ساز، حمل و نقل، تخصص های ابزارسازی موسسات آموزش عالی / اد. پروفسور S.M. Targa, - M .: Higher School, 1989. چاپ چهارم;
- A. V. Darkov، G. S. Shpiro. "مقاومت مصالح"؛
- Chernavsky S.A. طراحی دوره قطعات ماشین آلات: Proc. کتابچه راهنمای دانشجویان رشته های مهندسی مکانیک دانشکده های فنی / S. A. Chernavsky، K. N. Bokov، I. M. Chernin، و غیره - ویرایش 2، تجدید نظر شده. و اضافی - M. Mashinostroenie, 1988. - 416 p.: ill.
راه حل مکانیک فنی به سفارش
شرکت ما همچنین خدماتی را برای حل مسائل و تست های مکانیک ارائه می دهد. اگر در درک این موضوع مشکل دارید، همیشه می توانید یک راه حل دقیق را به ما سفارش دهید. ما کارهای سختی را انجام می دهیم!
می تواند رایگان باشد.
مکانیک نظری- این شاخه ای از مکانیک است که قوانین اساسی حرکت مکانیکی و تعامل مکانیکی اجسام مادی را تعیین می کند.
مکانیک نظری علمی است که در آن حرکات اجسام در طول زمان (حرکات مکانیکی) بررسی می شود. این به عنوان پایه ای برای بخش های دیگر مکانیک (نظریه ارتجاعی، مقاومت مواد، تئوری پلاستیسیته، نظریه مکانیسم ها و ماشین ها، هیدروآئرودینامیک) و بسیاری از رشته های فنی عمل می کند.
حرکت مکانیکی- این تغییر در طول زمان در موقعیت نسبی در فضای اجسام مادی است.
تعامل مکانیکی- این چنین تعاملی است که در نتیجه حرکت مکانیکی تغییر می کند یا موقعیت نسبی اعضای بدن تغییر می کند.
استاتیک بدنه صلب
استاتیک- این شاخه ای از مکانیک نظری است که به مسائل تعادل اجسام جامد و تبدیل یک سیستم نیرو به سیستم دیگر معادل آن می پردازد.
- مفاهیم و قوانین اساسی استاتیک
- بدنه کاملا سفت(جسم جامد، جسم) جسم مادی است که فاصله بین هیچ نقطه ای که در آن تغییر نمی کند.
- نقطه مادیجسمی است که با توجه به شرایط مشکل می توان ابعاد آن را نادیده گرفت.
- بدن شلجسمی است که برای حرکت آن هیچ محدودیتی اعمال نمی شود.
- بدنه غیر آزاد (محصول).جسمی است که حرکت آن محدود است.
- اتصالات- اینها اجسامی هستند که از حرکت جسم مورد نظر (جسم یا سیستم اجسام) جلوگیری می کنند.
- واکنش ارتباطینیرویی است که عملکرد یک پیوند را بر روی یک جسم صلب مشخص می کند. اگر نیرویی را که یک جسم صلب بر روی یک پیوند وارد می کند به عنوان یک عمل در نظر بگیریم، واکنش پیوند یک کنش متقابل است. در این حالت نیرو - عمل به اتصال و واکنش اتصال به جسم جامد اعمال می شود.
- سیستم مکانیکیمجموعه ای از اجسام به هم پیوسته یا نقاط مادی است.
- جامدرا می توان سیستمی مکانیکی دانست که موقعیت و فاصله بین نقاط آن تغییر نمی کند.
- زوریک کمیت برداری است که عملکرد مکانیکی یک جسم مادی بر جسم دیگر را مشخص می کند.
نیرو به عنوان یک بردار با نقطه اعمال، جهت عمل و قدر مطلق مشخص می شود. واحد اندازه گیری مدول نیرو نیوتن است. - خط نیروخط مستقیمی است که بردار نیرو در امتداد آن هدایت می شود.
- قدرت متمرکزنیروی اعمال شده در یک نقطه است.
- نیروهای توزیع شده (بار توزیع شده)- اینها نیروهایی هستند که بر تمام نقاط حجم، سطح یا طول بدن وارد می شوند.
بار توزیع شده توسط نیروی وارد بر واحد حجم (سطح، طول) داده می شود.
ابعاد بار توزیع شده N / m 3 (N / m 2، N / m) است. - نیروی خارجینیرویی است که از جسمی وارد می شود که به سیستم مکانیکی در نظر گرفته شده تعلق ندارد.
- قدرت درونینیرویی است که بر نقطه مادی یک سیستم مکانیکی از نقطه مادی دیگر متعلق به سیستم مورد بررسی وارد می شود.
- سیستم نیرومجموع نیروهای وارد بر یک سیستم مکانیکی است.
- سیستم مسطح نیروهاسیستمی از نیروها است که خطوط عمل آنها در یک صفحه قرار دارد.
- سیستم فضایی نیروهاسیستمی از نیروها است که خطوط عمل آنها در یک صفحه قرار ندارد.
- سیستم نیروی همگراسیستمی از نیروهایی است که خطوط عمل آنها در یک نقطه قطع می شود.
- سیستم اختیاری نیروهاسیستمی از نیروها است که خطوط عمل آنها در یک نقطه قطع نمی شود.
- سیستم های معادل نیروها- اینها سیستم هایی از نیروها هستند که جایگزینی آنها با دیگری وضعیت مکانیکی بدن را تغییر نمی دهد.
نام پذیرفته شده: . - تعادلحالتی که در آن جسم ثابت می ماند یا تحت تأثیر نیروها به طور یکنواخت در یک خط مستقیم حرکت می کند.
- سیستم متوازن نیروها- این سیستمی از نیروها است که وقتی به یک جسم جامد آزاد اعمال می شود، حالت مکانیکی آن را تغییر نمی دهد (آن را نامتعادل نمی کند).
 .
. - نیروی حاصلنیرویی است که عمل آن بر یک جسم معادل عملکرد سیستمی از نیروها است.
 .
. - لحظه قدرتمقداری است که توانایی چرخشی نیرو را مشخص می کند.
- زوج قدرتیک سیستم متشکل از دو نیروی موازی با قدر مطلق مساوی با جهت مخالف است.
نام پذیرفته شده: .
تحت تأثیر چند نیرو، بدن یک حرکت چرخشی انجام می دهد. - طرح ریزی نیرو بر روی محور- این قطعه ای است محصور بین عمودهای رسم شده از ابتدا و انتهای بردار نیرو به این محور.
اگر جهت قطعه با جهت مثبت محور منطبق باشد، طرح ریزی مثبت است. - طرح ریزی نیرو در هواپیمابردار روی صفحه ای است که بین عمودهای رسم شده از ابتدا و انتهای بردار نیرو به این صفحه محصور شده است.
- قانون 1 (قانون اینرسی).یک نقطه مادی جدا شده در حال سکون است یا به صورت یکنواخت و مستقیم حرکت می کند.
حرکت یکنواخت و یکنواخت یک نقطه مادی یک حرکت اینرسی است. حالت تعادل یک نقطه مادی و یک جسم صلب نه تنها به عنوان حالت سکون، بلکه به عنوان یک حرکت با اینرسی درک می شود. برای یک بدن سفت و سخت، وجود دارد انواع مختلفحرکت با اینرسی، برای مثال، چرخش یکنواخت یک جسم صلب حول یک محور ثابت. - قانون 2.یک جسم صلب تحت تأثیر دو نیرو فقط در حالت تعادل قرار می گیرد که این نیروها از نظر قدر مساوی باشند و در جهت مخالف در امتداد یک خط عمل مشترک هدایت شوند.
این دو نیرو را متعادل می نامند.
به طور کلی، اگر جسم صلبی که این نیروها به آن اعمال می شود در حالت سکون باشد، نیروها متعادل می شوند. - قانون 3.بدون نقض حالت (کلمه "حالت" در اینجا به معنای حالت حرکت یا استراحت است) یک جسم صلب، می توان نیروهای متعادل کننده را اضافه و کنار گذاشت.
نتیجه. بدون ایجاد اختلال در وضعیت جسم صلب، نیرو را می توان در طول خط عمل خود به هر نقطه ای از بدن منتقل کرد.
دو سیستم نیرو در صورتی معادل نامیده می شوند که بتوان یکی از آنها را با دیگری جایگزین کرد بدون اینکه حالت جسم صلب مختل شود. - قانون 4.حاصل دو نیروی وارد شده در یک نقطه در یک نقطه اعمال می شود، از نظر قدر مطلق برابر است با قطر متوازی الاضلاع ساخته شده بر روی این نیروها، و در امتداد این جهت است.
مورب ها
مدول حاصل عبارت است از: - قانون 5 (قانون برابری کنش و واکنش). نیروهایی که دو جسم بر روی یکدیگر وارد میکنند از نظر قدر مساوی هستند و در امتداد یک خط مستقیم در جهت مخالف هستند.
باید در نظر داشت که عمل- نیرویی که به بدن وارد می شود ب، و مخالفت- نیرویی که به بدن وارد می شود ولی، متعادل نیستند، زیرا به بدن های مختلف متصل هستند. - قانون 6 (قانون سخت شدن). تعادل جسم غیر جامد هنگام جامد شدن به هم نمی خورد.
نباید فراموش کرد که شرایط تعادلی که برای یک جسم صلب لازم و کافی است، برای جسم غیر صلب متناظر لازم است اما کافی نیست. - قانون 7 (قانون رهایی از اوراق قرضه).یک جسم جامد غیرآزاد را در صورتی می توان آزاد در نظر گرفت که از نظر ذهنی از پیوندها رها شده باشد و عمل پیوندها را با واکنش های مربوط به پیوندها جایگزین کند.
- اتصالات و واکنش های آنها
- سطح صافحرکت در امتداد نرمال به سطح تکیه گاه را محدود می کند. واکنش عمود بر سطح هدایت می شود.
- تکیه گاه متحرک مفصلیحرکت بدن را در امتداد نرمال به صفحه مرجع محدود می کند. واکنش در امتداد نرمال به سطح پشتیبانی هدایت می شود.
- پشتیبانی ثابت مفصلیبا هر حرکتی در صفحه عمود بر محور چرخش مقابله می کند.
- میله بدون وزن مفصلیبا حرکت بدن در امتداد خط میله مقابله می کند. واکنش در امتداد خط میله هدایت می شود.
- خاتمه کوربا هر حرکت و چرخشی در هواپیما مقابله می کند. عمل آن را می توان با یک نیروی ارائه شده به صورت دو جزء و یک جفت نیرو با یک لحظه جایگزین کرد.




سینماتیک
سینماتیک- بخشی از مکانیک نظری که خصوصیات هندسی کلی حرکت مکانیکی را به عنوان فرآیندی در فضا و زمان در نظر می گیرد. اجسام متحرک به عنوان نقاط هندسی یا اجسام هندسی در نظر گرفته می شوند.
- مفاهیم اساسی سینماتیک
- قانون حرکت یک نقطه (جسم)وابستگی موقعیت یک نقطه (جسم) در فضا به زمان است.
- مسیر نقطه ایمکان موقعیت یک نقطه در فضا در طول حرکت آن است.
- سرعت نقطه (بدنه).- این مشخصه تغییر زمان موقعیت یک نقطه (جسم) در فضا است.
- شتاب نقطه (بدنه).- این مشخصه تغییر زمان سرعت یک نقطه (جسم) است.
- تعیین ویژگی های سینماتیکی یک نقطه
- مسیر نقطه ای
در سیستم مرجع برداری، مسیر با عبارت: .
در سیستم مرجع مختصات، مسیر طبق قانون حرکت نقطه تعیین می شود و با عبارات توصیف می شود. z = f(x,y)در فضا، یا y = f(x)- در هواپیما.
AT سیستم طبیعیمسیر مرجع از پیش تعیین شده است. - تعیین سرعت یک نقطه در سیستم مختصات برداری
هنگام تعیین حرکت یک نقطه در یک سیستم مختصات برداری، نسبت حرکت به بازه زمانی را مقدار متوسط سرعت در این بازه زمانی می گویند: .
با در نظر گرفتن فاصله زمانی به عنوان یک مقدار بی نهایت کوچک، مقدار سرعت را در یک زمان معین به دست می آوریم (مقدار سرعت آنی): .
.
بردار سرعت متوسط در امتداد بردار در جهت حرکت نقطه هدایت می شود، بردار سرعت لحظه ای به صورت مماس بر مسیر در جهت حرکت نقطه هدایت می شود.
نتیجه: سرعت یک نقطه یک کمیت برداری برابر با مشتق قانون حرکت نسبت به زمان است.
ویژگی مشتق: مشتق زمانی هر مقدار، میزان تغییر این مقدار را تعیین می کند. - تعیین سرعت یک نقطه در یک سیستم مرجع مختصات
میزان تغییر مختصات نقطه: .
.
ماژول سرعت کامل یک نقطه با سیستم مختصات مستطیلی برابر با: .
.
جهت بردار سرعت توسط کسینوس های زوایای فرمان تعیین می شود: ,
,
زوایای بین بردار سرعت و محورهای مختصات کجا هستند. - تعیین سرعت یک نقطه در یک سیستم مرجع طبیعی
سرعت یک نقطه در یک سیستم مرجع طبیعی به عنوان مشتق قانون حرکت یک نقطه تعریف می شود: .
با توجه به نتایج قبلی، بردار سرعت به صورت مماس بر مسیر در جهت حرکت نقطه هدایت می شود و در محورها تنها با یک برآمدگی تعیین می شود.
- سینماتیک بدن صلب
- در سینماتیک اجسام صلب دو مشکل اصلی حل می شود:
1) وظیفه حرکت و تعیین ویژگی های سینماتیک بدن به عنوان یک کل؛
2) تعیین ویژگی های سینماتیکی نقاط بدن. - حرکت انتقالی یک جسم صلب
حرکت انتقالی حرکتی است که در آن یک خط مستقیم که از دو نقطه بدن کشیده می شود موازی با موقعیت اصلی خود باقی می ماند.
قضیه: در حرکت انتقالی، تمام نقاط بدن در امتداد یک مسیر حرکت می کنند و در هر لحظه از زمان سرعت و شتاب یکسانی در مقدار مطلق و جهت دارند..
نتیجه: حرکت انتقالی یک جسم صلب با حرکت هر یک از نقاط آن تعیین می شود و بنابراین، کار و مطالعه حرکت آن به سینماتیک یک نقطه کاهش می یابد.. - حرکت چرخشی یک جسم صلب حول یک محور ثابت
حرکت چرخشی جسم صلب حول یک محور ثابت حرکت جسم صلب است که در آن دو نقطه متعلق به جسم در تمام مدت حرکت بی حرکت می مانند.
موقعیت بدن با زاویه چرخش تعیین می شود. واحد اندازه گیری زاویه رادیان است. (رادیان زاویه مرکزی دایره ای است که طول قوس آن برابر با شعاع است، زاویه کامل دایره شامل 2πرادیان.)
قانون حرکت چرخشی یک جسم حول یک محور ثابت.
سرعت زاویه ای و شتاب زاویه ای بدنه با روش تمایز تعیین می شود:
- سرعت زاویه ای، راد/ثانیه؛
- شتاب زاویه ای، راد/ثانیه مربع.
اگر بدنه را با صفحه ای عمود بر محور برش دهیم، نقطه ای از محور چرخش را انتخاب کنیم. باو یک نکته دلخواه م، سپس نکته ماطراف نقطه را شرح خواهد داد بادایره شعاع آر. در حین dtیک چرخش ابتدایی از طریق زاویه وجود دارد، در حالی که نقطه مدر طول مسیر برای مسافتی حرکت خواهد کرد .
.
ماژول سرعت خطی: .
.
شتاب نقطه ای مبا یک مسیر مشخص توسط اجزای آن تعیین می شود: ,
,
جایی که .
.
در نتیجه فرمول هایی به دست می آید
شتاب مماسی: ;
;
شتاب معمولی: .
.

پویایی شناسی
پویایی شناسی- این شاخه ای از مکانیک نظری است که حرکات مکانیکی اجسام مادی را بسته به عللی که باعث ایجاد آنها می شود مطالعه می کند.
- مفاهیم اساسی دینامیک
- اینرسی- این خاصیت اجسام مادی است که تا زمانی که نیروهای خارجی این حالت را تغییر دهند، حالت استراحت یا حرکت یکنواخت یکنواخت را حفظ می کنند.
- وزناندازه گیری کمی اینرسی یک جسم است. واحد جرم کیلوگرم (کیلوگرم) است.
- نقطه مادیجسمی با جرم است که در حل این مشکل از ابعاد آن غفلت می شود.
- مرکز جرم یک سیستم مکانیکییک نقطه هندسی است که مختصات آن با فرمول تعیین می شود:
جایی که m k، x k، y k، z k- جرم و مختصات ک- آن نقطه از سیستم مکانیکی، مترجرم سیستم است.
در یک میدان گرانش یکنواخت، موقعیت مرکز جرم با موقعیت مرکز ثقل منطبق است. - ممان اینرسی جسم مادی حول محوراندازه گیری کمی اینرسی در طول حرکت چرخشی است.
ممان اینرسی یک نقطه مادی حول محور برابر است با حاصل ضرب جرم نقطه و مجذور فاصله نقطه از محور: .
.
ممان اینرسی سیستم (جسم) حول محور برابر است با مجموع حسابی گشتاورهای اینرسی همه نقاط:
- نیروی اینرسی یک نقطه مادییک کمیت برداری است که از نظر مقدار مطلق برابر با حاصلضرب جرم یک نقطه و مدول شتاب است و در مقابل بردار شتاب قرار دارد:
- نیروی اینرسی جسم مادییک کمیت برداری است که از نظر مقدار مطلق برابر با حاصل ضرب جرم بدن و مدول شتاب مرکز جرم بدن است و در مقابل بردار شتاب مرکز جرم قرار دارد:
شتاب مرکز جرم بدن کجاست. - تکانه نیروی عنصریکمیت برداری برابر با حاصل ضرب بردار نیرو در بازه زمانی بینهایت کوچک است dt:
.
کل ضربه نیرو برای Δt برابر است با انتگرال تکانه های اولیه: .
. - کار ابتدایی نیرواسکالر است dA، برابر با اسکالر
-
 17 آوریل 2015تزار بوریس اول فئودوروویچ گودونوف
17 آوریل 2015تزار بوریس اول فئودوروویچ گودونوف -
 17 آوریل 2015یلتسین چه حزبی بود
17 آوریل 2015یلتسین چه حزبی بود -
 17 آوریل 2015چرا می خواهید گچ بخورید و چگونه با آن مقابله کنید
17 آوریل 2015چرا می خواهید گچ بخورید و چگونه با آن مقابله کنید

 - دارو یا نه")
 - دارو یا نه")



